BrachBot Design Project
Branch Traversing Robot for Forest Exploration.
Year 2 Group Project, 2023.
The Brief.
Forest canopy research has become increasingly important for understanding rainforest ecosystems and addressing climate change. However, the techniques currently used to access forest canopies such as climbing ladders, canopy cranes and aerial lifts remain physically demanding, inherently dangerous, and may cause damage to the surrounding forest and disrupt local ecosystems.
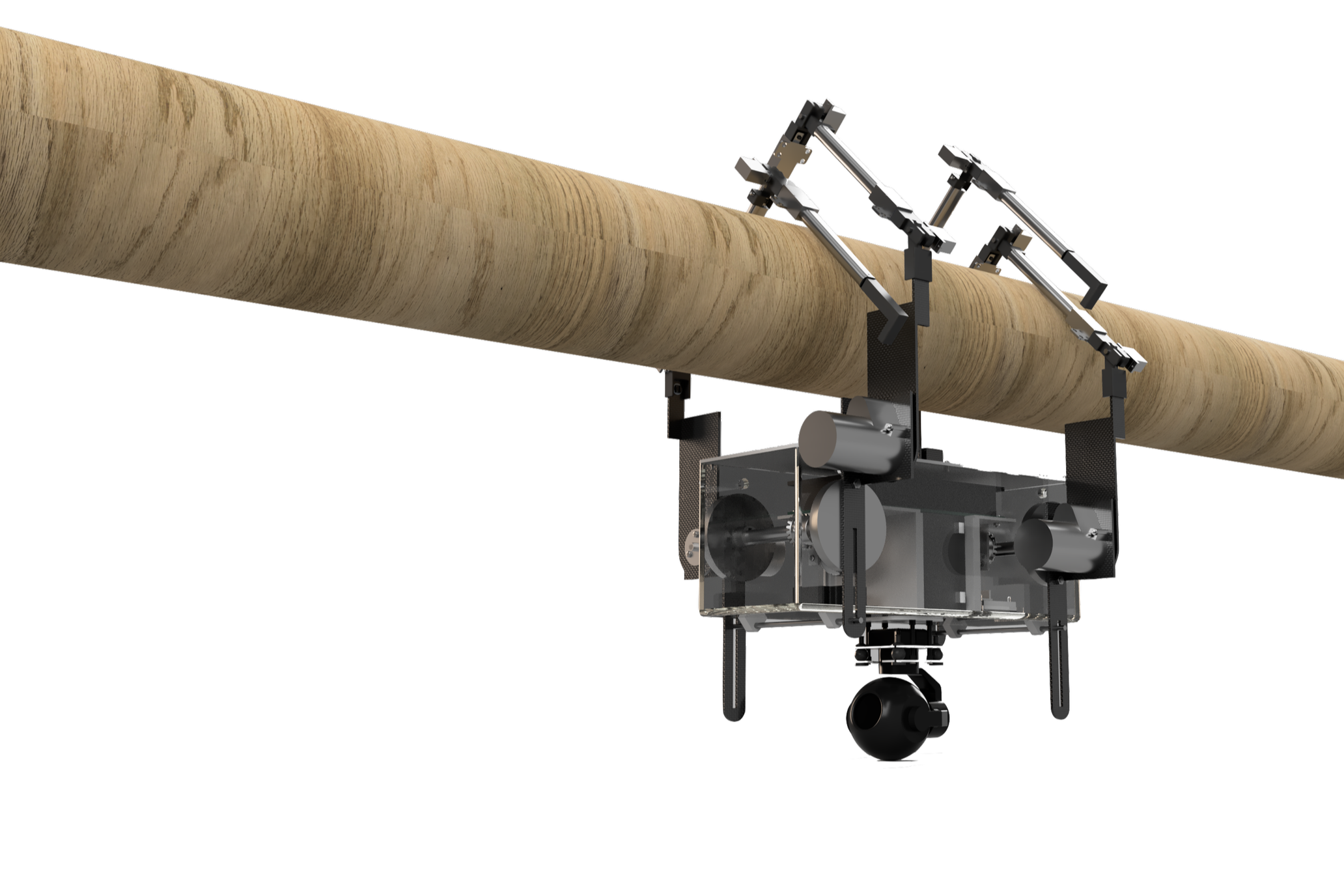
The client company has proposed designing an arboreal robot to conduct forest canopy exploration and monitoring. The robot is required to be able to move steadily along a single branch and traverse from branch to branch when required while carrying a camera to capture images of its surroundings.

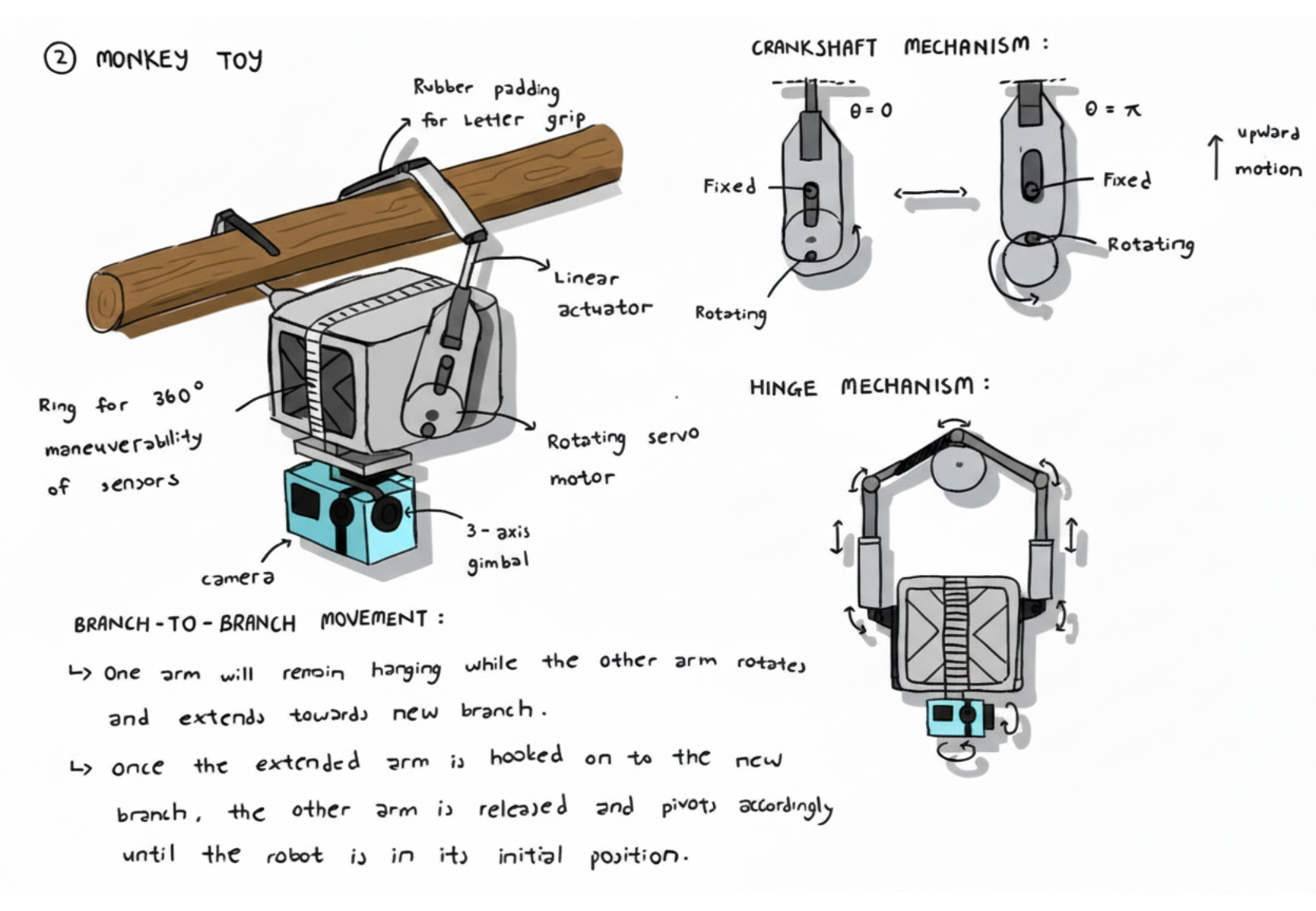
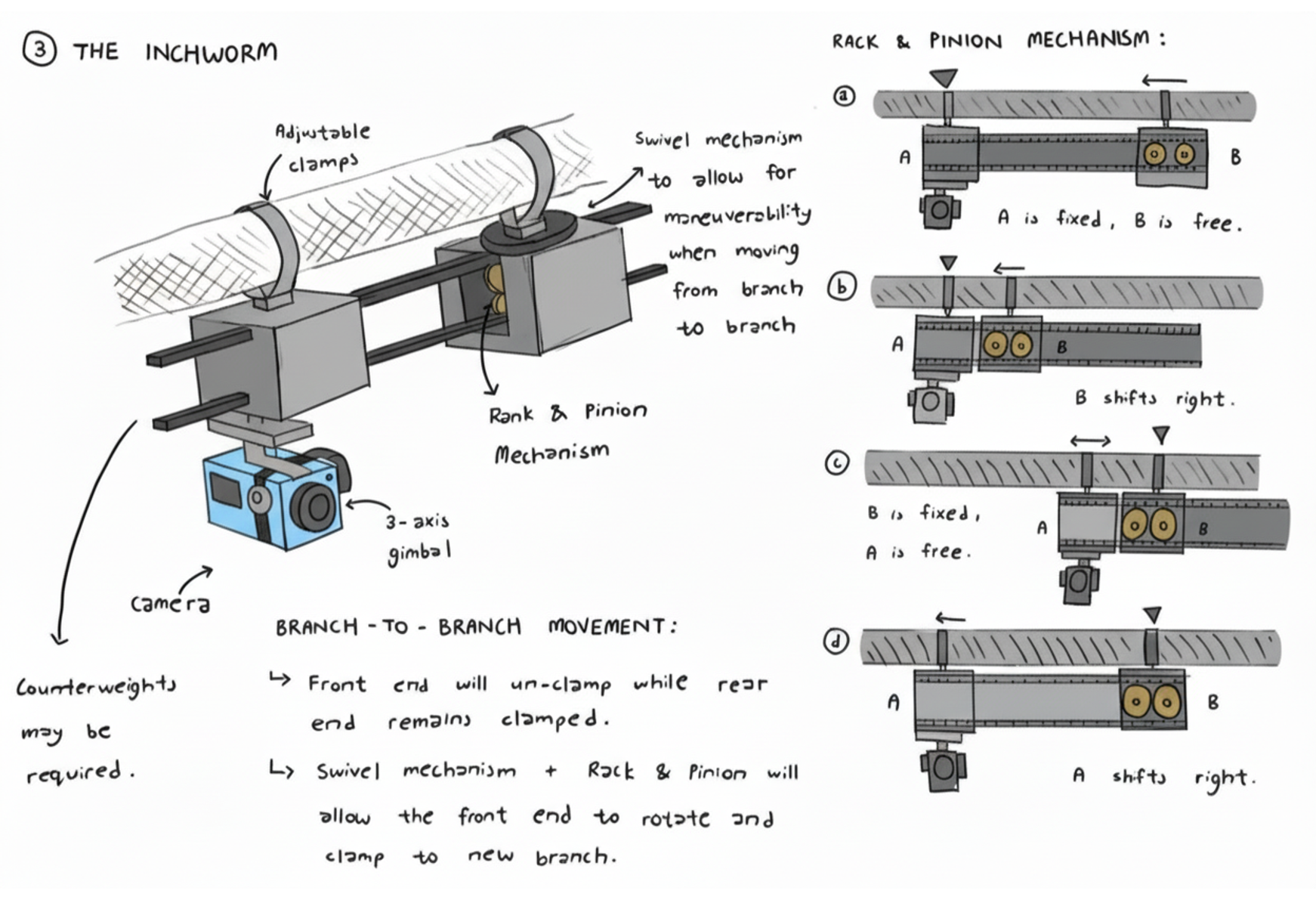
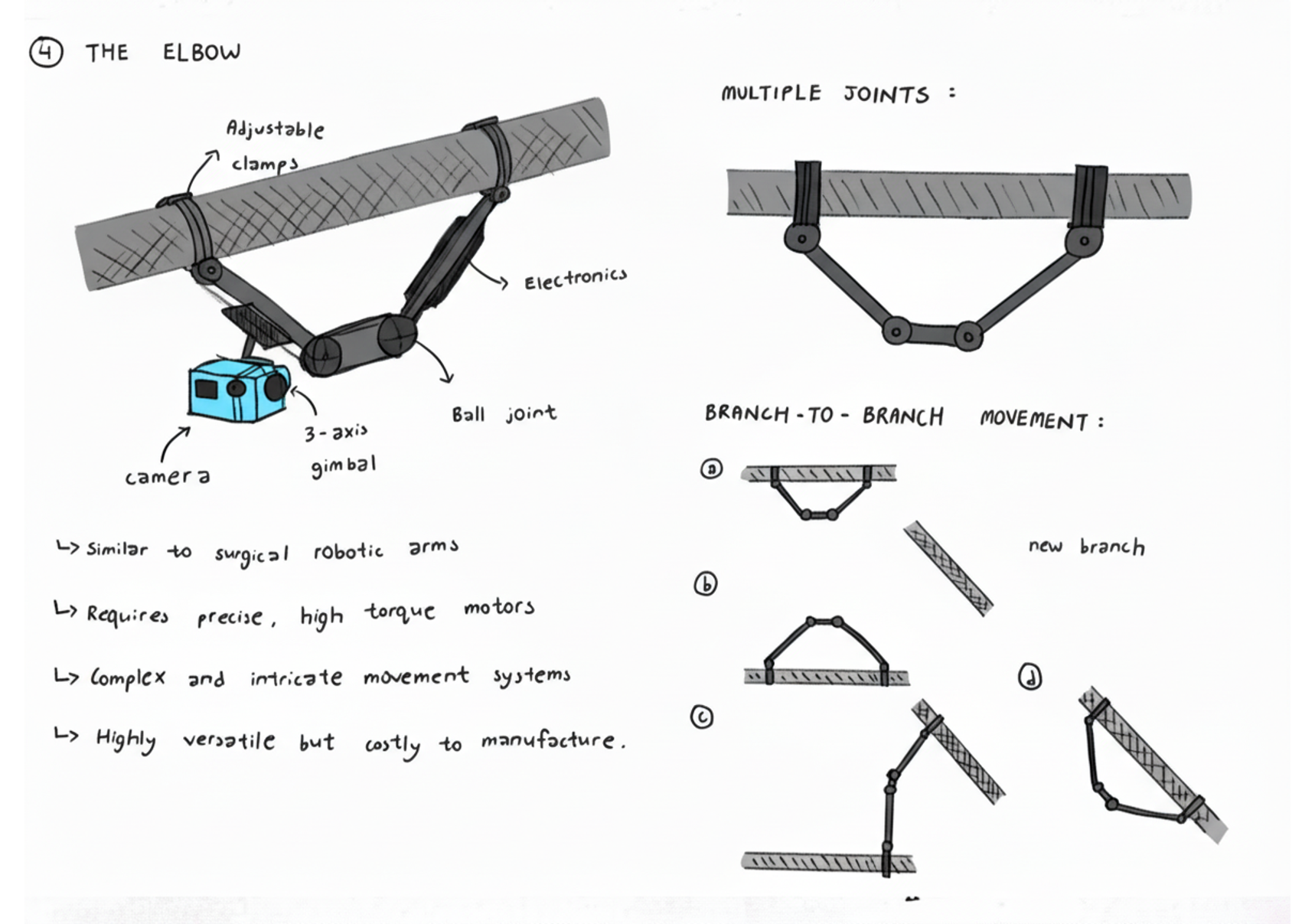
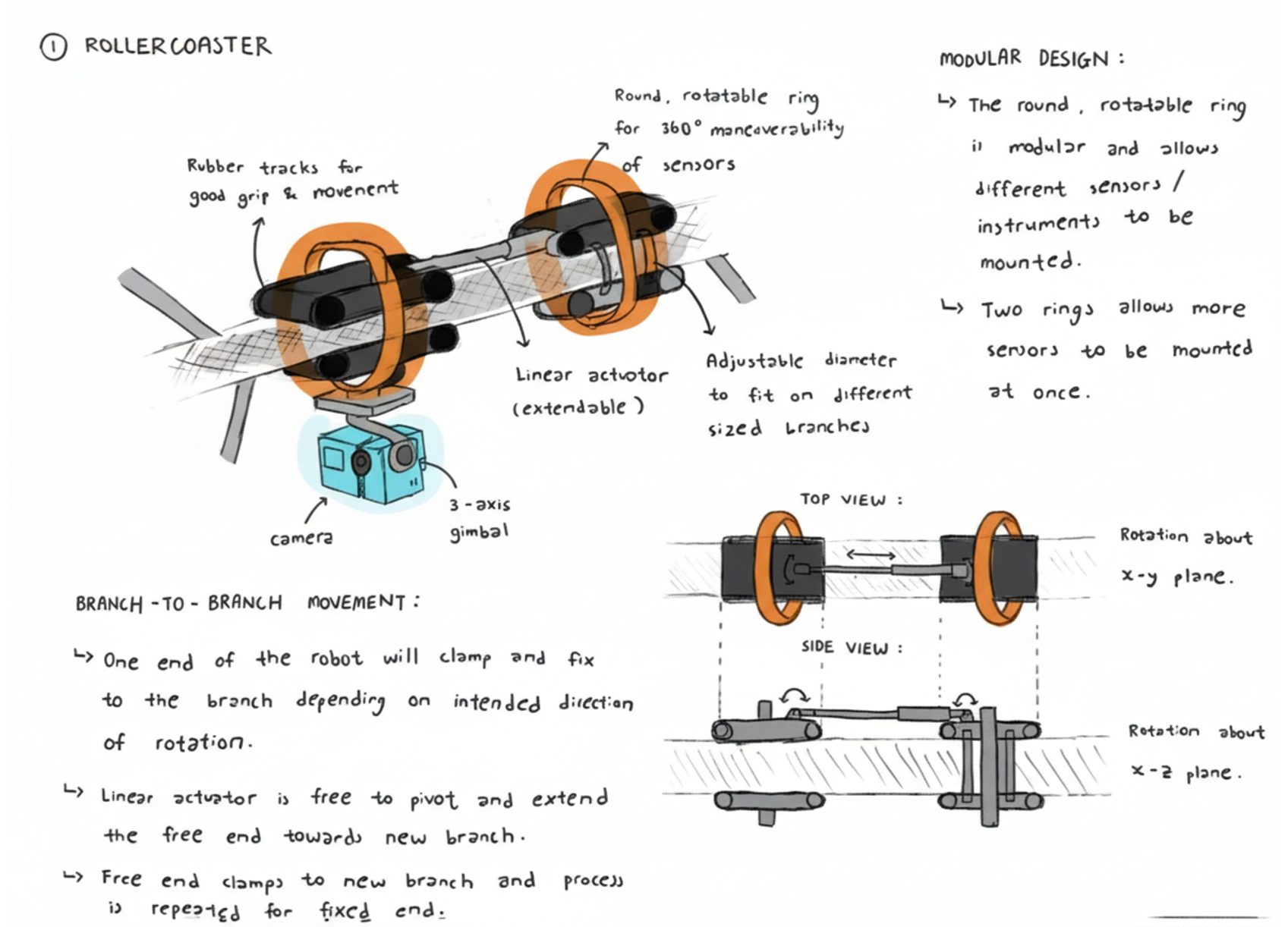
Concept Sketches:
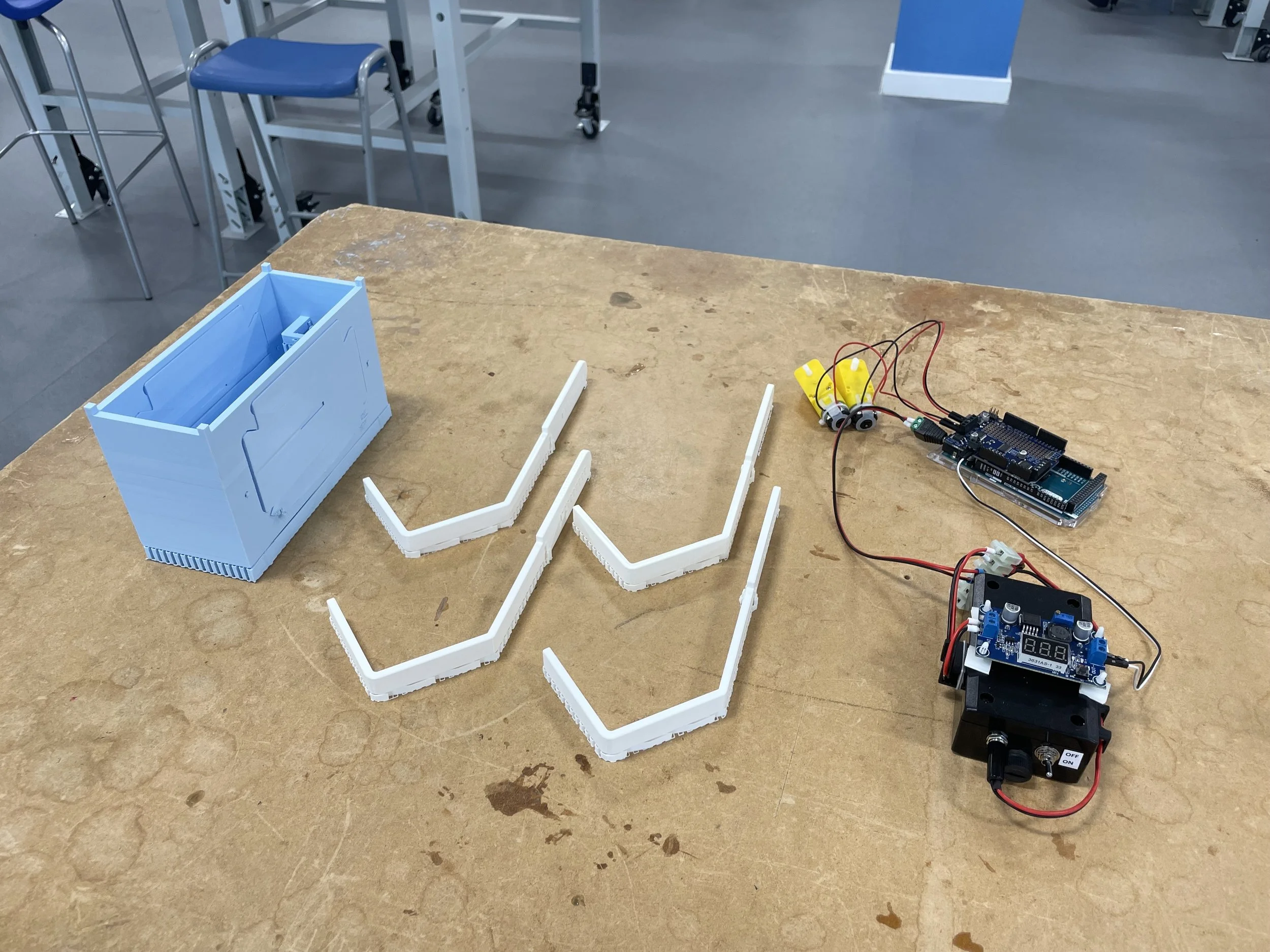
Prototype Development:
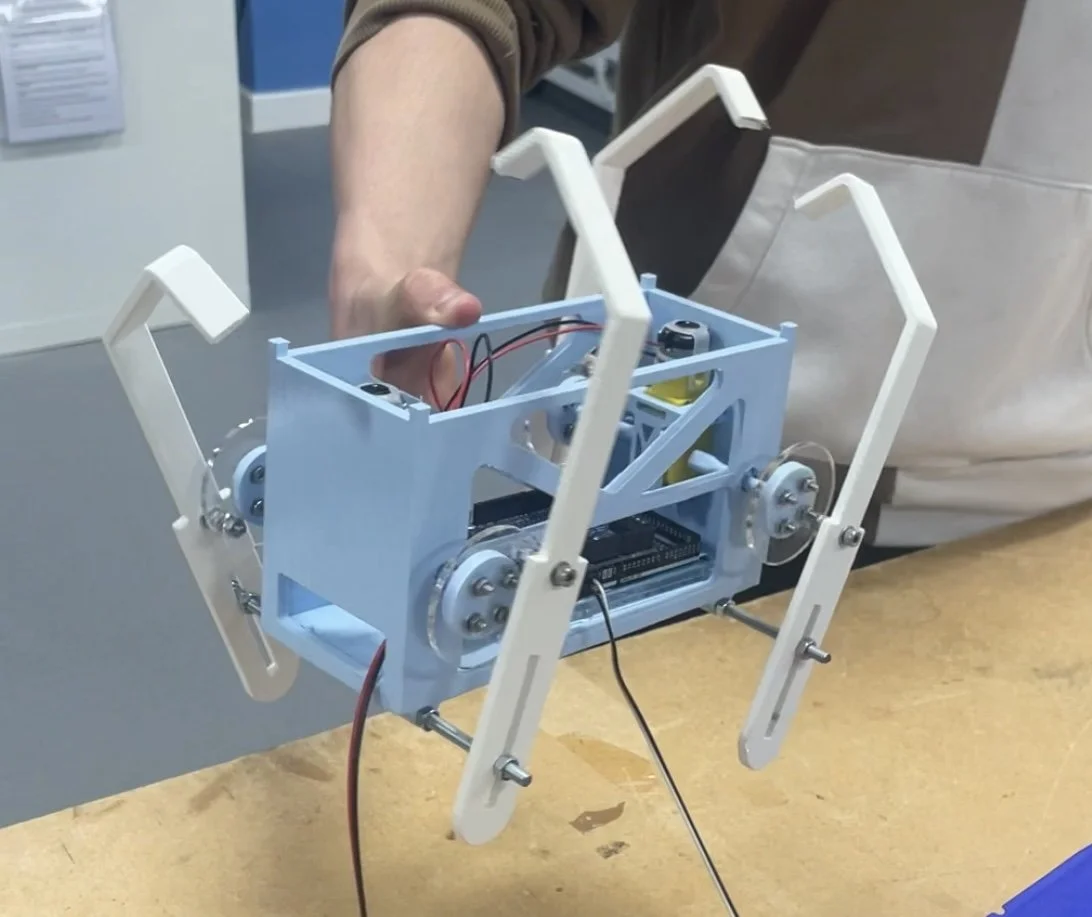
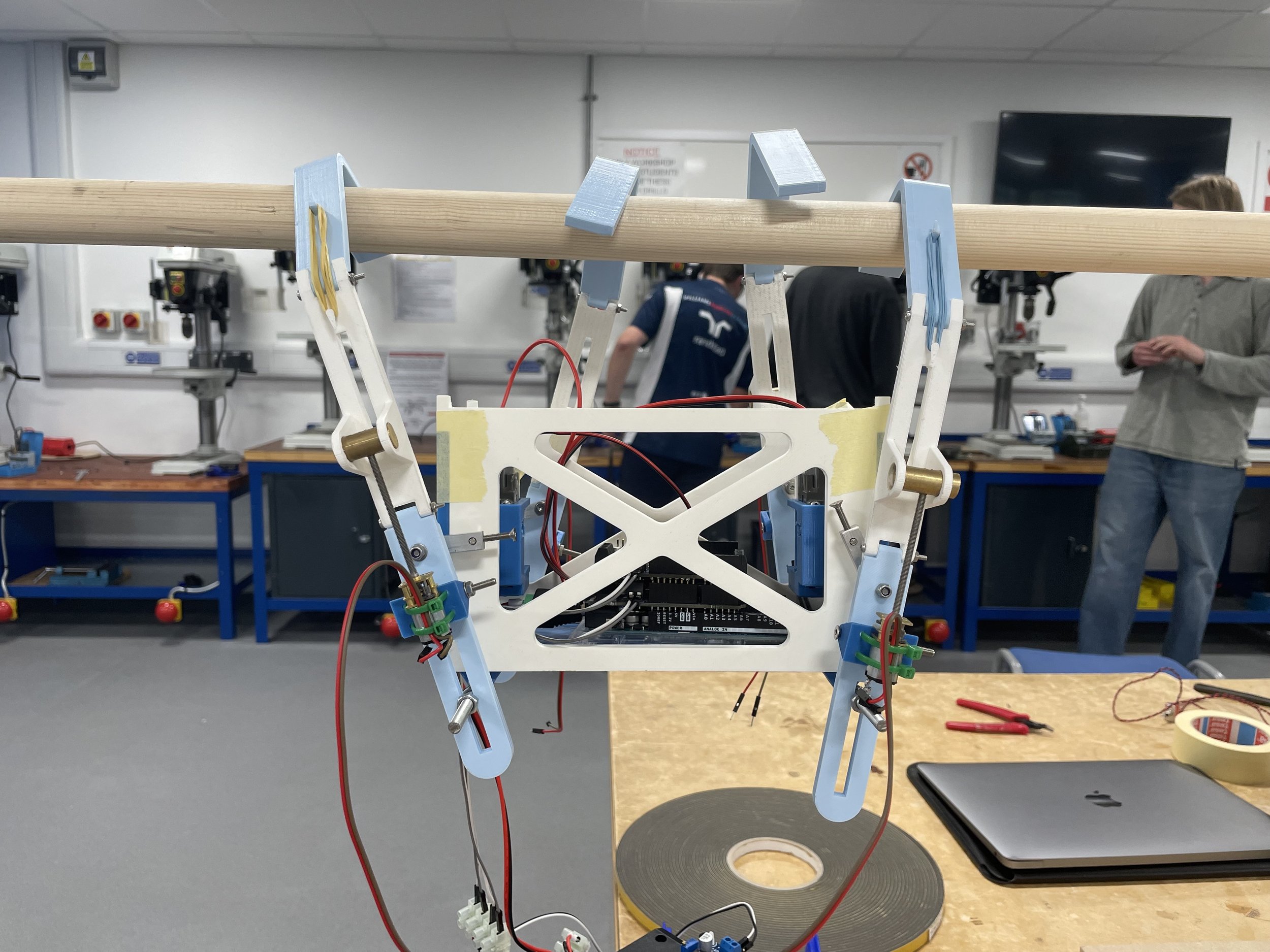
In order to demonstrate a proof of concept, a physical prototype of our design was created. The 3D model was made using Fusion 360 CAD software and the parts were fabricated using 3D printers. As for the electronics, the prototype utilised Arduino microcontroller programming and two geared motors which drive the movement of the arms.
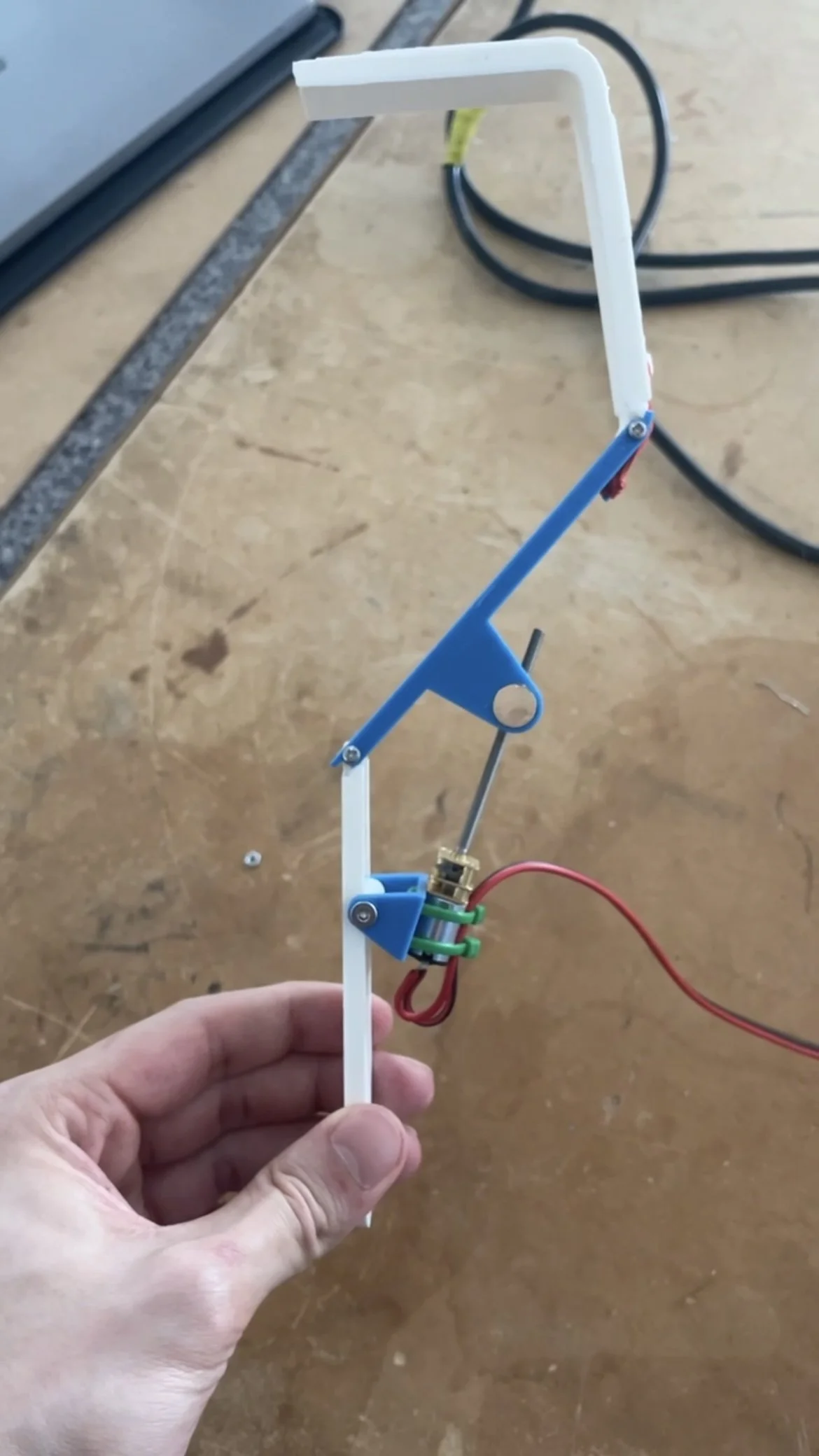
To allow for movement of the joints, each arm housed a miniature gear motor which drives a threaded rod attached to a brass hinge. As the motor rotates, the arm bends outwards or inwards depending on the direction of rotation. The robot was remote controlled and a miniature webcam was mounted at the front of the robot to simulate real world usage.

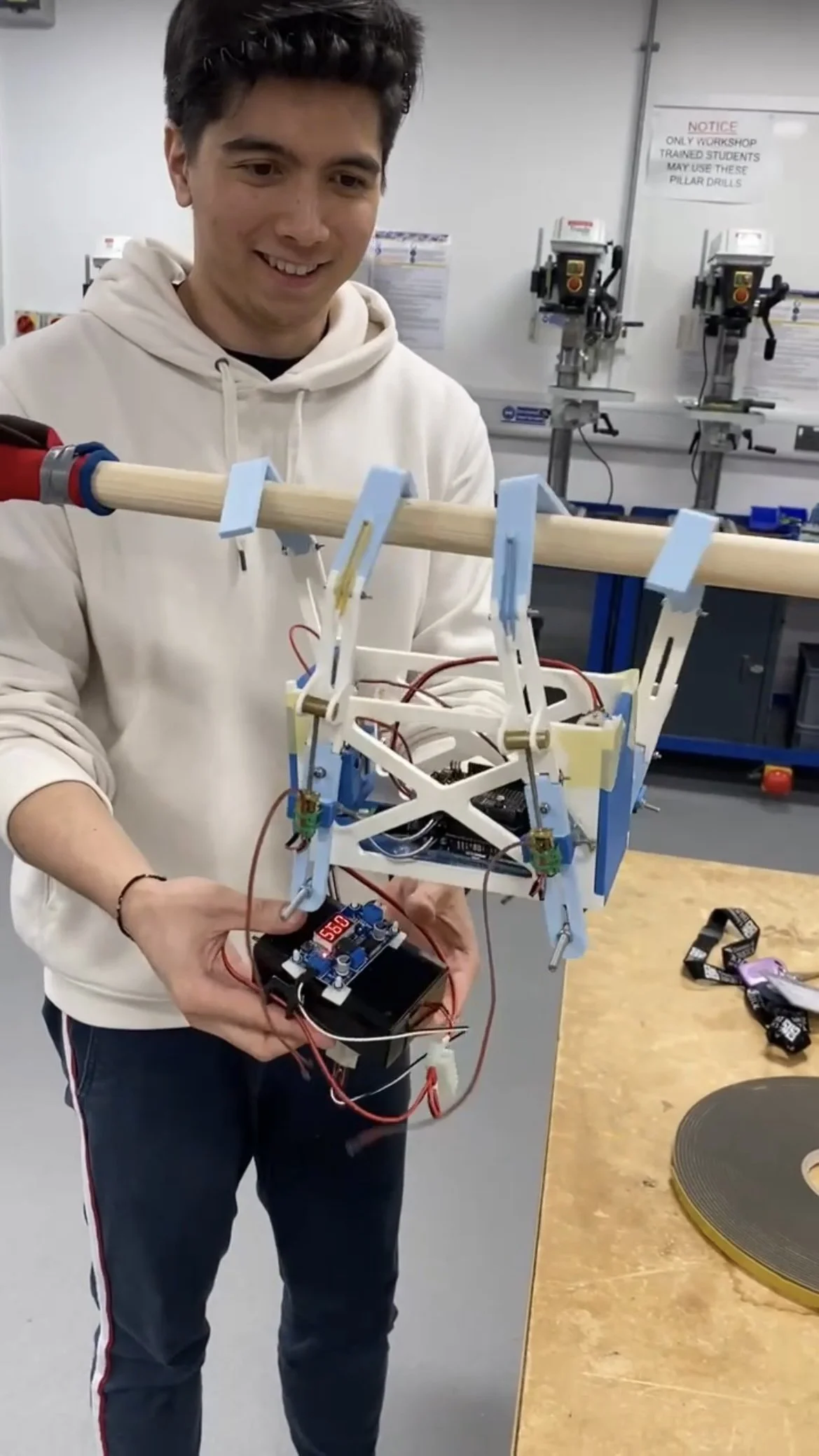


Prototype Demonstration:
The final prototype robot was showcased in our live demonstration to the rest of the Engineering Design cohort. Our robot, slowly but surely, traversed across the branches to capture an image of a creature on the other end.
Watch the full video here:
